A puha robotok egyik legnagyobb problémája eddig a kiszámítható mozgás hiánya volt: bár rugalmas szerkezeteket régóta képesek gyártani a mérnökök, azok precíz vezérlése komoly kihívást jelentett. A Harvard Egyetem kutatócsoportja most azt állítja, hogy áttörést ért el: egy új, 3D nyomtatási eljárással magába az anyagba kódolják a mozgást. Az Advanced Materials folyóiratban bemutatott technika lehetővé teszi, hogy a nyomtatott szerkezetek levegő befújásával pontosan az előre meghatározott módon csavarodjanak, hajoljanak vagy görbüljenek.
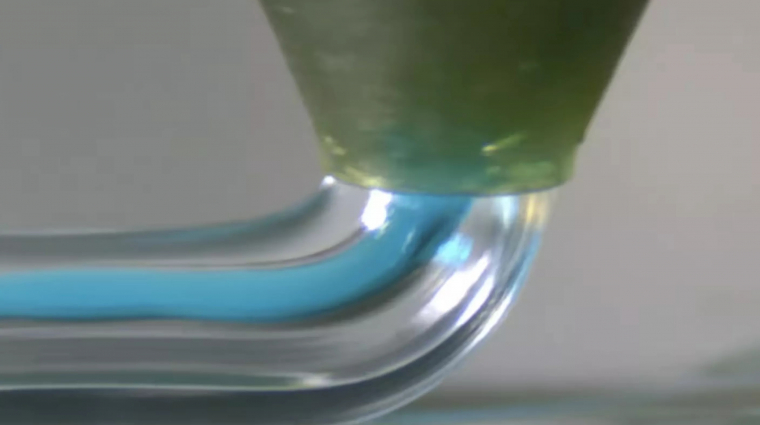
A módszer Jennifer Lewis laboratóriumából származik, ahol elsősorban a többanyagú 3D nyomtatással kapcsolatos kutatások zajlanak. A kutatók egy forgó fúvókát használnak, amelyen keresztül egyszerre több anyag áramlik, így a nyomtatás során pontosan meghatározható, hogy az egyes anyagok hol helyezkedjenek el a szálon belül. A külső réteg egy strapabíró poliuretán burkolat, míg belül egy gél állagú polimer tölti ki ideiglenesen a későbbi légcsatornák helyét. A nyomtatás után a gélt egyszerűen kimossák, így precízen kialakított üreges járatok maradnak vissza.
Ezek a csatornák működnek a puha robotok "izmaiként": nyomás hatására meghatározott irányban kényszerítik a szerkezetet mozgásra. A megoldás leegyszerűsíti a tervezést és a gyártást, mivel a korábban többnapos, összetett összeszerelési folyamat egyetlen nyomtatási lépéssé válik. A kutatók demonstrációként egy virágszerűen kinyíló spirált és egy tárgyakat megragadni képes, hajlékony fogót készítettek. A technológia a jövőben nemcsak az ipari robotikában, hanem az orvosi eszközök, viselhető segédeszközök és érzékeny alkatrészeket kezelő gyártósorok területén is új lehetőségeket nyithat.
